pekee, le robot télécommuniquant
Mots Clefs
Resumé
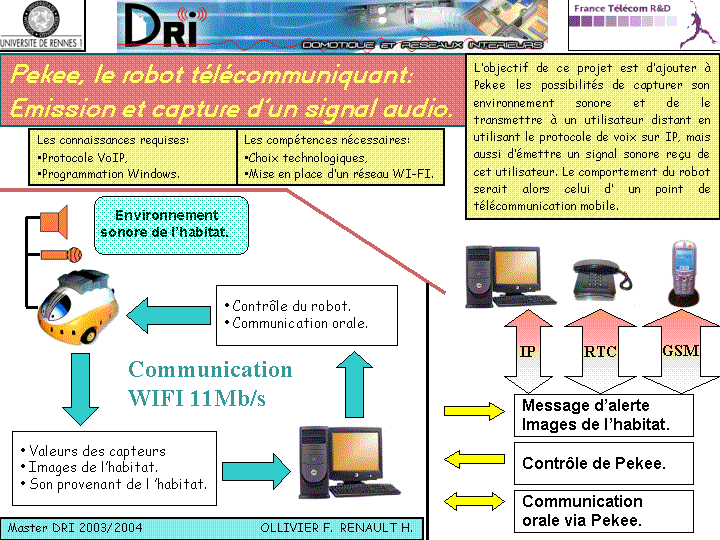
Lobjectif de ce projet est dajouter à Pekee les possibilités de capturer son environnement sonore et de le transmettre à un utilisateur distant en utilisant le protocole de voix sur IP, mais aussi démettre un signal sonore reçu de cet utilisateur. Le comportement du robot serait alors celui d un point de télécommunication mobile.
Voir aussi :
- Enrichissement d'un service d'aide au Maintien à Domicile
2007 | stage | M2 IDBCI (ex ITEA) | Chang Hak Wathana - Transmission VDI (voix données images) dans l'habitat par la solution 3M
2006 | projet | M2 IDBCI (ex ITEA) | Fabrice Houssais et Olivier Huet - Etablissements FLEURY - Bureau d’étude, paramétrage et mise en oeuvre sur chantier.
2009 | stage_lic | L3 SPH | Julien Romano - Choix technologique radio et développement d'une solution pour un contrôle d'environnement pour handicapé
2011 | stage | M2 IDBCI (ex ITEA) | Thierry Gaudry - Systèmes domotiques adaptés au handicap : Etude et maquettage
2005 | projet | M2 IDBCI (ex ITEA) | David Brisset et Marhem Jean-Francois - Définition d'une chaine d'alerte et spécification d'un service interactif sur la TNT
2007 | projet | M2 IDBCI (ex ITEA) | Chang Hak Wathana et Azali Ben Rachadi - Téléassistance: Etat de l'Art
2010 | projet | M2 IDBCI (ex ITEA) | Nada Fahes et Vincent Leferrand - Télésanté: Usages et Technologies
2006 | projet | M2 IDBCI (ex ITEA) | Jeremy Drean , Robin Jean Maurice et Robin Robin - Mise en situation du protocole de contrôle / commande OpenWebNet
2011 | stage | M2 IDBCI (ex ITEA) | Francois Louet - Développement de fonctionnalités et d'interfaces d'aide à la gestion du bâtiment tertiaire
2008 | stage | M2 IDBCI (ex ITEA) | Mathieu Gallissot