Intégration de systèmes visuels pour chariots mobiles
Mots Clefs
Resumé
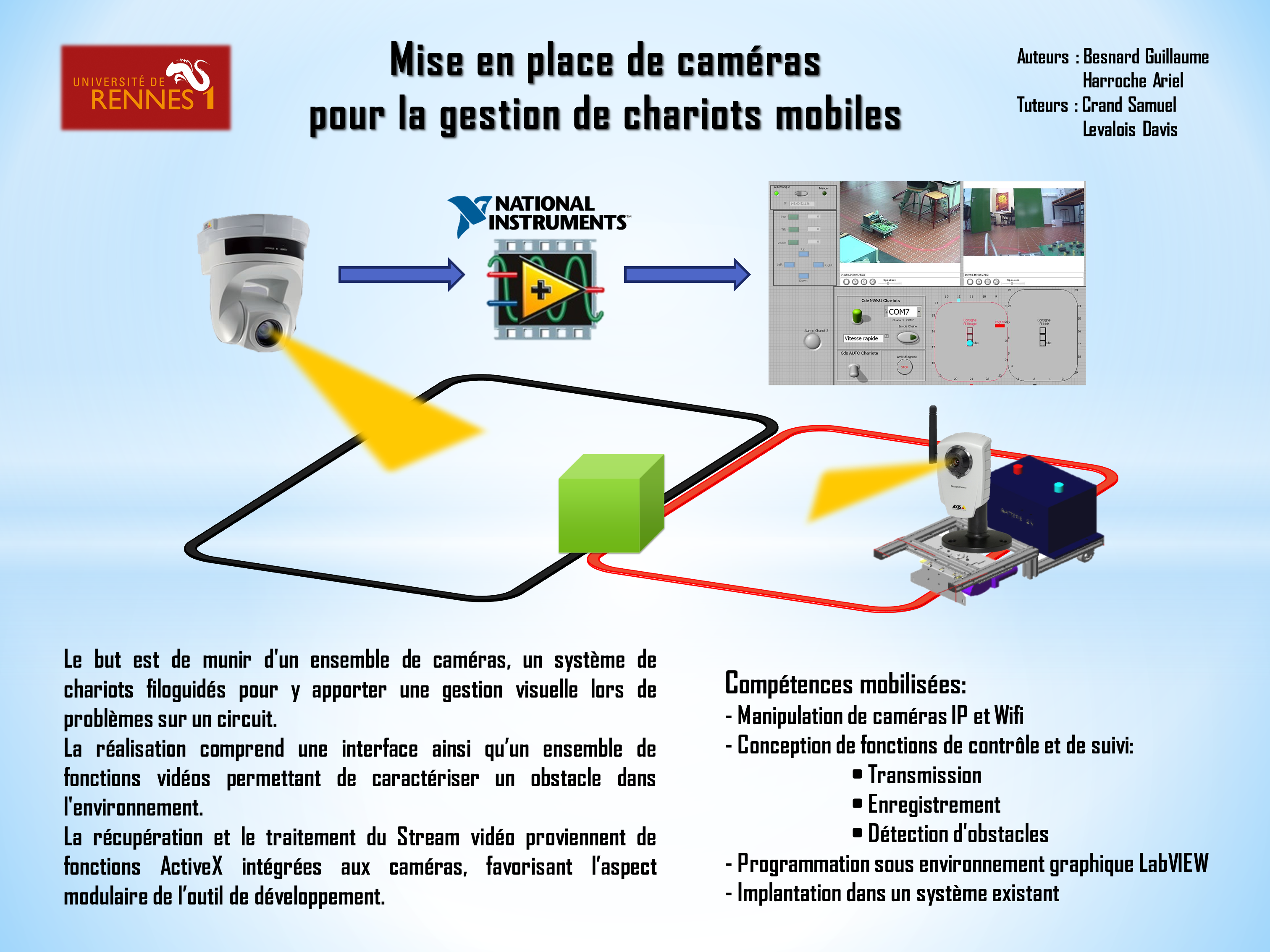
Le but de ce projet est d'apporter un outils visuel au chariot filoguidé disponible à l'université de Rennes 1. L'intérêt est d'approcher un peu plus les chariots que l'on trouve dans l'industrie, et pourra donc servir de plateforme pédagogique la plus complète possible. Le projet montre l'implentation des caméras dans le système déjà existant ainsi que le développement des fonctions nécessaire à un suivi optique de la scène du chariot. Les caméras peuvent influer sur la gestion par détection d'obstacles et permettent d'en analyser les causes via enregistrements.
Voir aussi :
- Gestion d’énergie et de sécurité d’un habitat par Drone multi-capteurs
2014 | projet | L3ET | Josselin Colleter , El-Mehdi Lafouyri , Mehdi Lafouyri El et Gatean Schwartz - Télésanté: Usages et Technologies
2006 | projet | M2 IDBCI (ex ITEA) | Jeremy Drean , Robin Jean Maurice et Robin Robin - Intégration et Test d’une installation multimédia à bord d’un yacht
2006 | stage | M2 IDBCI (ex ITEA) | Robin Robin - Etude, Intégration et Mise en Service - Architecture Domotique
2015 | stage | L3 SPH | Dominique Tardif - GER'HOME (Gerontology at home) Services numériques de maintien à domicile des personnes âgées
2007 | stage | M2 IDBCI (ex ITEA) | Pascal Roussel - Solution de sécurité par ETS Laumont
2016 | stage | L3 SPH | Jean-Christophe Allaire